Microgravity Undergraduate Research Team
Dillon Eyer, Monica Leibowitz, Amanda White, Zachariah Vandeventer, Heather Dyer, Andrew Byrd, Dustin Nguyen, Terek Zimmerman, Carolyn Murrey, Hugh Sheldon, Morgan Hill, Jeremy Bouchard, Jessica Mueller, Adam Torek, Kalynn Cotten, Jose Escobosa, Tyler Johnson, Nathan Sundquist, Zuly Lapa, Ryan Olson, David Maldonado, Aidan McConnehey, Keaton Poe, Libbie Luevanos, Andrew Handzel, Dr. Steve Swanson, Gus Engstrom, Megan Gambs, Dr. Gunes Uzer

Background
Conducting research in lakes and rivers requires large crews and heavy-duty equipment, making even simple tests costly and time consuming (as seen in Figure 1). We have taken our previous research in autonomous Unmanned Surface Vehicles (USVs) for NASA and applied our efforts to relieving this problem.

Requirements
Our team developed requirements for the project to best guide our solution; the most important of which being basic safety guidelines during operation as to not harm the operator or the vessel itself. It must accommodate a variety of equipment and be modular during operation. In addition, the system must be operable by only one operator, or by means of autonomous GPS navigation.
Design
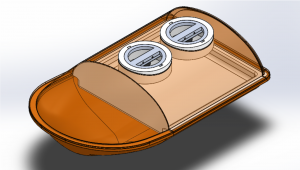
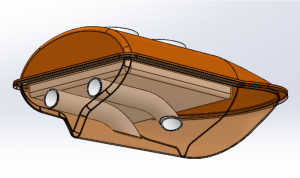
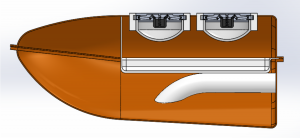
The vessel was conceptually modeled after conventional watercraft, giving it exceptional stability while affording portability and modularity. The figures to the right (Figure 2, 3, and 4) demonstrate these design goals with a single deep keel and easy dual-actuating hatches on top.
Making water-bound experiments fast and modular
Status
Currently, we were preparing our first prototype utilizing mostly off the shelf components. The Pixhawkflight system has been chosen to handle navigation and remote control while a small kayak is being used for the vessel’s hull. The project’s progress has halted to comply with university research procedures during this pandemic, with plans to resume as soon as possible. An updated photograph can be seen in Figure 5.

We would like to thank the Idaho Space Grant Consortium for their financial contributions to our research.
Additional Information

For questions or comments about this research, contact Dillon Eyer at dilloneyer@u.boisestate.edu.