Inexpensive. Effective. User Friendly.
Trevor M. Klabo, Tyler Valdez, Trevin Whitehead, Nicholas Petitmermet, Callum Young, Dr. Amy Moll, Dr. Noah Salzman, Dr. Vicki Stieha, Shane Panter, Susan Latta
Introduction
With the decreasing cost of increasingly capable robots, our team plans to modify and create a system around a robotic arm to aid people living with disabilities. Our partner on this project (CH) is a resident at an assisted living center (AV). CH was diagnosed with Multiple Sclerosis, a degenerative disease where he is limited to a powered wheelchair with no upper or lower body movement, aside from very restricted use of his left hand and controlled use of his neck.
Goal
Semester Goals
- Create Tablet App to control Robot.
- Design a workspace for improved workflow.
- Arm base designed to mount on CH’s desk.
- Get Minimum Viable product to CH.
Long Term Goal
Provide a low cost solution for potential future users that could benefit from this type of technology

Packet Generation
Communication between the tablet app and robot arm is done via the packet specifications made by Trossen Robotics. Specifications state that the packet must be 17 bytes long, containing a header, information for the Arduino to update all servos in the arm, and a checksum to validate that the entire packet was received correctly. A communications class was developed as a way for the app to interface with an call methods to create packets in a layered style.
User Centered Design
The success of this project is measured by how we are able to change the daily life of our client. Therefore, our design process was heavily influenced by CH’s specific needs.
Constraints:
- User does not have reliable use of hands
- End product must be installed non-destructively
- Solution must cost less than $600
- User can interface with solution via stylus
User Interface
CH uses a stylus with a mouthpiece to interact with his tablet. We decided to have the tablet and stylus be our input method for the robot
Mounting
Living in an assisted living facility means CH can’t make any permanent changes to his living space. We decided to make our solution modular so it wouldn’t cause any damage and could be moved to different locations.
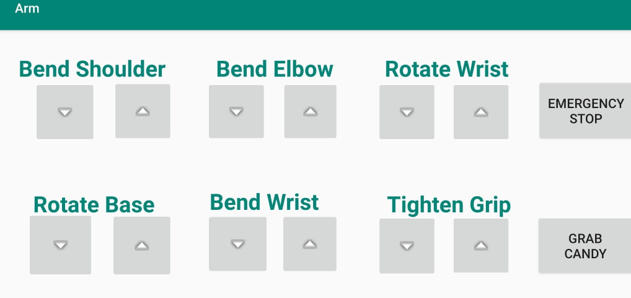
Application
We needed an application that could be used by CH and be controlled via the stylus he uses. These considerations led us to choosing large buttons to control the arm that are well spaced so there are no accidental changes. We gave control over each servo for fine tuned movement and some larger control to stop and pick up candy.
Hardware Design
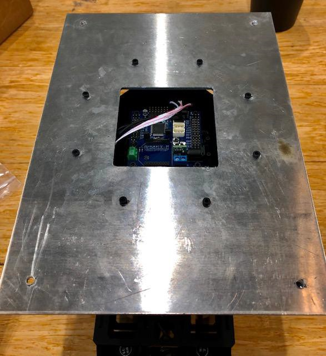
Base is designed from a flat sheet of 6061 Aluminum that is about an eighth of an inch thick.
From there, a CAD file was created on SolidWorks using the dimensions of the plate. Next, the holes for where the base and arm mounting pins meet were added as well as suction cup holes.
The CAD file was then put into the computer and plasma cut.
Design Decisions
- We have included a button for returning to home position to keep the arm in a compact position
- Position memory for repetitive movements, such as obtaining objects from a bowl.
- Base with suction cups to stabilize the arm for extended reaching
Future Plans
Initially we wanted to get the arm to CH during the semester. As a team we’ve had to change our goals due to the COVID-19 outbreak. Our new goal is to set up the next team so they can get the arm to CH by day one if needed. We hope that in the future more similar assistive technology can be used for people similar to our patient.
Next Steps:
- Get robot and app to CH
- Automate common actions
- Design harness for tablet that attaches to both the users desk and power chair
- Remove Caretaker from process
Conclusion
- Our arm is still in the beginning stages of what we hope for it to become. We really wanted to give our client CH more autonomy within his living facility to improve his quality of life.
- We plan on designing a workstation so that attachments can be made and easily placed in positions around the arm.
- We designed an app tailored to CH and his preferred input method.
- We released the app so that others can benefit from our work.
Additional Information
For questions or comments about this research, contact Trevor Klabo at TrevorKlabo@u.boisestate.edu.